



Trijų ašių horizontalus posūkio pozicionierius / suvirinimo roboto pozicionierius
Techniniai parametrai
| Vertikalus posūkio triašis servo padėties nustatymo įrenginys | Horizontalus rotacinis triašis servo padėties nustatymo įrenginys | ||||||
| Serijos numeris | PROJEKTAI | Parametras | Parametras | PASTABOS | Parametras | Parametras | PASTABOS |
| 1 | Nominali apkrova | 500 kg | 1000 kg | R400 mm spinduliu nuo antrosios ašies | 500 kg | 1000 kg | R400 mm / R500 mm spinduliu nuo antrosios ašies |
| 2 | Standartinis veleno sukimosi spindulys | R1200 mm | R1500 mm | R1200 mm | R1800 mm | ||
| 3 | Standartinis priešveleno sukimosi spindulys | R400 mm | R500 mm | R400 mm | R500 mm | ||
| 4 | Pirmosios ašies posūkio kampas | ±180° | ±180° | ±180° | ±180° | ||
| 5 | Antrosios ašies sukimosi kampas | ±360° | ±360° | ±360° | ±360° | ||
| 6 | Nominalus pirmosios ašies sukimosi greitis aukštyn | 50°/P | 24°/P | 50°/P | 24°/P | ||
| 7 | Nominalus antrosios ašies sukimosi greitis | 70°/P | 70°/P | 70°/P | 70°/P | ||
| 8 | Pakartotinio padėties nustatymo tikslumas | ±0,10 mm | ±0,20 mm | ±0,10 mm | ±0,20 mm | ||
| 9 | Poslinkio rėmo ribinis matmuo (ilgis × plotis × aukštis) | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | 2200 mm × 800 mm × 90 mm | 3200 mm × 1000 mm × 110 mm | ||
| 10 | Bendras padėties keitiklio matmuo (ilgis × plotis × aukštis) | 4000 mm × 700 mm × 1650 mm | 5200 mm × 1000 mm × 1850 mm | 4000 mm × 700 mm × 1650 mm | 4500 mm × 3600 mm × 1750 mm | ||
| 11 | Pirmosios ašies sukimosi centro aukštis | 1350 mm | 1500 mm | 800 mm | 1000 mm | ||
| 12 | Maitinimo sąlygos | Trifazis 200 V ± 10 % 50 Hz | Trifazis 200 V ± 10 % 50 Hz | Trifazis 200 V ± 10 % 50 Hz | Trifazis 200 V ± 10 % 50 Hz | Su izoliaciniu transformatoriumi | |
| 13 | Izoliacijos klasė | H | H | H | H | ||
| 14 | Įrangos grynasis svoris | Apie 1800 kg | Apie 3000 kg | Apie 2000 kg | Apie 2000 kg | ||
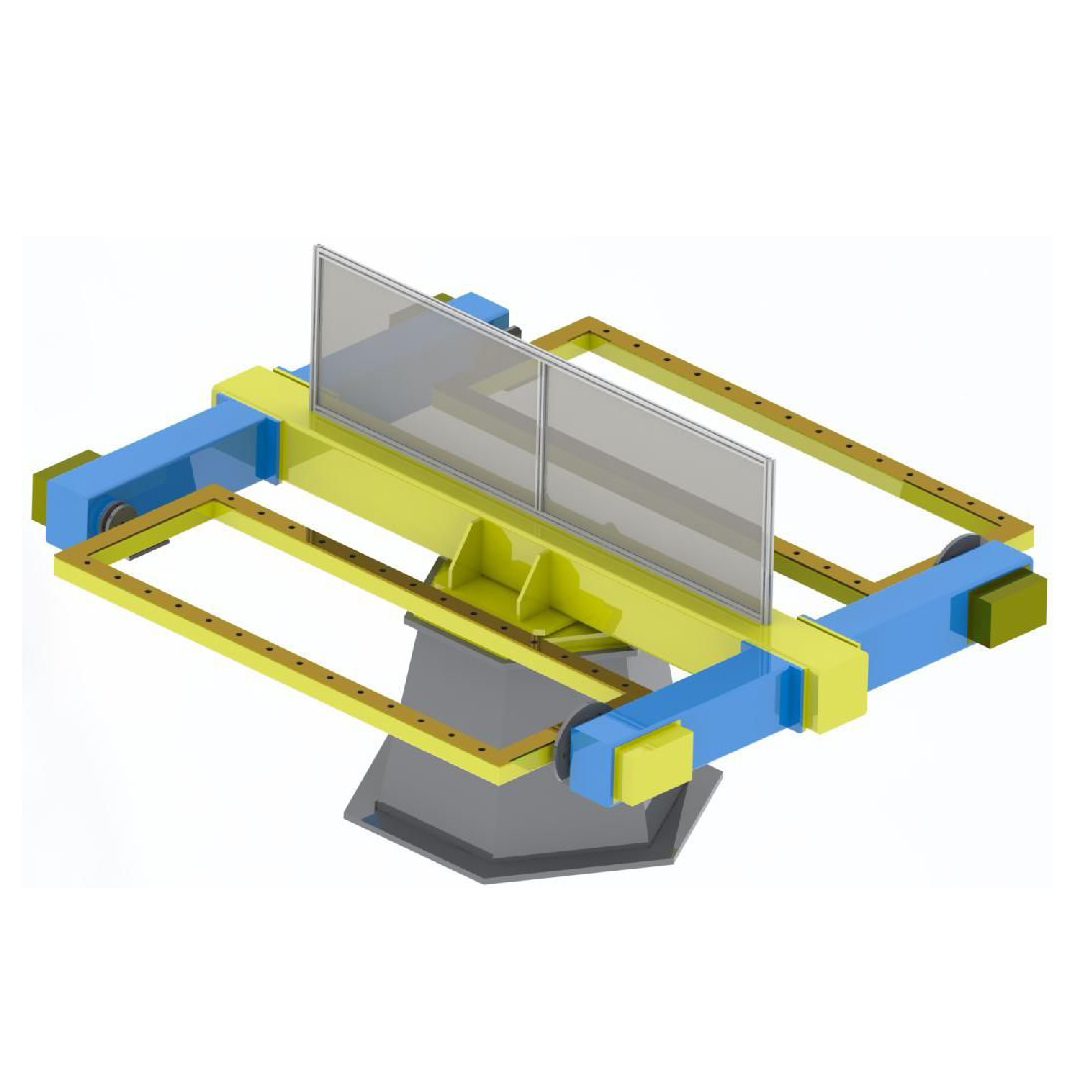
Horizontalus rotacinis triašis servo padėties nustatymo įrenginys

Vertikalus posūkio triašis servo padėties nustatymo įrenginys
Struktūros įvadas
Triašis vertikalus posūkio servo padėties nustatymo įrenginys daugiausia sudarytas iš suvirinto integruoto rėmo, posūkio poslinkio rėmo, kintamosios srovės servo variklio ir RV tikslumo reduktoriaus, sukamosios atramos, laidžiojo mechanizmo, apsauginio skydo ir elektrinės valdymo sistemos.
Suvirintas vientisas rėmas suvirinamas iš aukštos kokybės profilių. Atkaitinus ir atkaitinus, jis apdorojamas profesionaliai, siekiant užtikrinti aukštą apdirbimo tikslumą ir raktų pozicijų tikslumą. Paviršius purškiamas gražiais ir gausiais antikoroziniais dažais, kurių spalvą galima pritaikyti pagal kliento reikalavimus.
Apvertimo ir poslinkio rėmas turi būti suvirintas iš aukštos kokybės profiliuoto plieno ir apdirbtas profesionaliai. Paviršiuje turi būti išgręžtos standartinės srieginės skylės tvirtinimo įrankiams, atliktas dažymas, juodinimas ir apsauga nuo rūdžių.
Kaip galios mechanizmas pasirinktas kintamosios srovės servo variklis su RV reduktoriumi, kuris gali užtikrinti sukimosi stabilumą, padėties nustatymo tikslumą ir
Ilgas patvarumas ir mažas gedimų dažnis. Laidus mechanizmas pagamintas iš žalvario, kuris pasižymi geru laidumu. Laidus pagrindas turi integruotą izoliaciją, kuri gali efektyviai apsaugoti servo variklį, robotą ir suvirinimo maitinimo šaltinį.
Elektrinė valdymo sistema naudoja japonišką „Omron PLC“ padėties nustatymo įrenginiui valdyti, užtikrinant stabilų veikimą ir mažą gedimų dažnį. Elektriniai komponentai parenkami iš žinomų prekių ženklų šalyje ir užsienyje, siekiant užtikrinti kokybę ir naudojimo stabilumą.
Šviesą blokuojantis skydas surinktas iš aliuminio profilio ir aliuminio plastikinės plokštės, kad apsaugotų nuo suvirinimo ir pjovimo metu susidarančios lanko šviesos.








